Visual Line Following (Gazebo)
Hint
The operating environment and software and hardware configurations are as follows:
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
Make sure that you have completed the configuration of the Gazebo virtual simulation environment,and then try to perform a visual line patrol in the simulation environment.
Start the virtual line patrol environment
Run the following command on the PC:
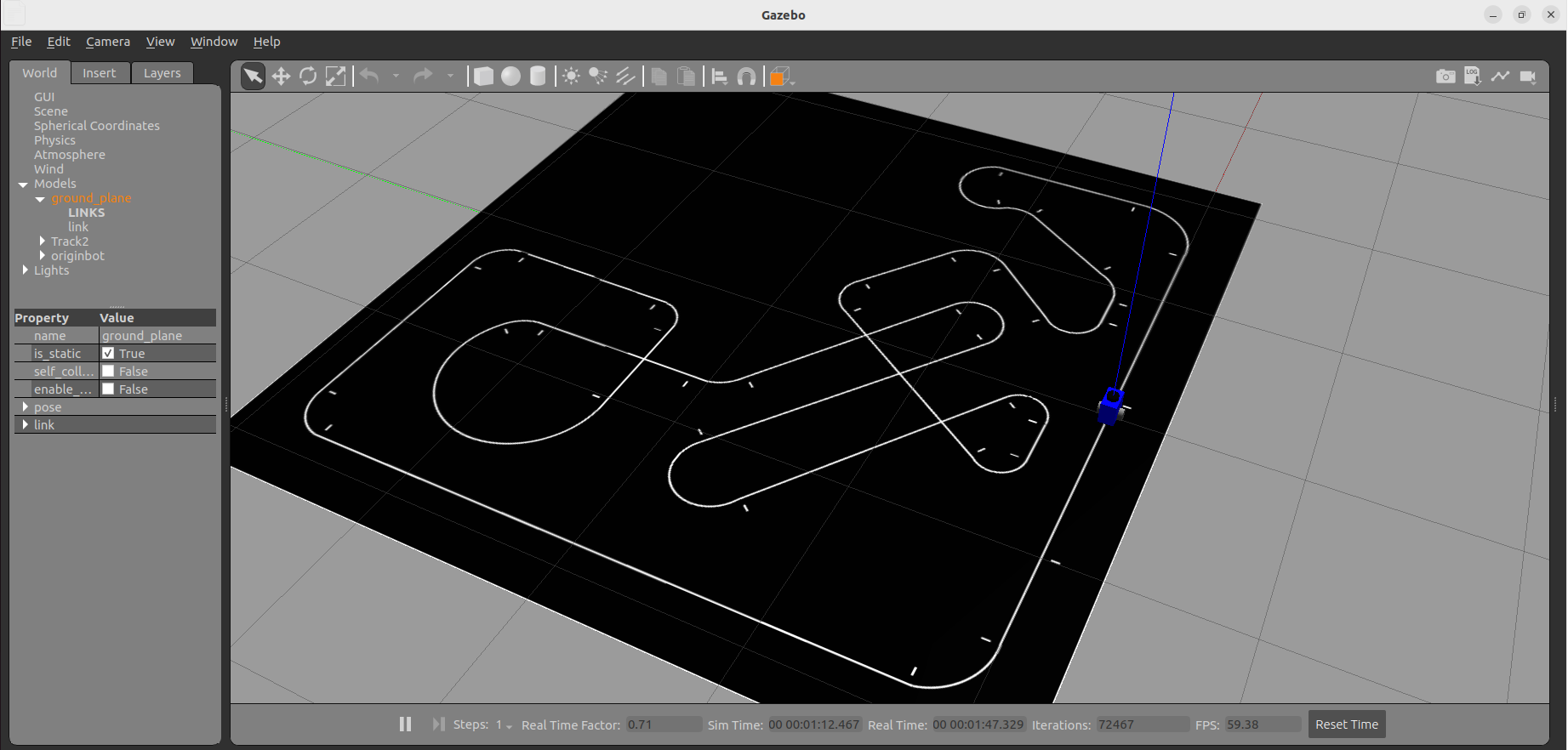
After Gazebo is successfully launched, you can see the yellow guide line, and the simulated robot is at the beginning of the guide line.
View camera image data
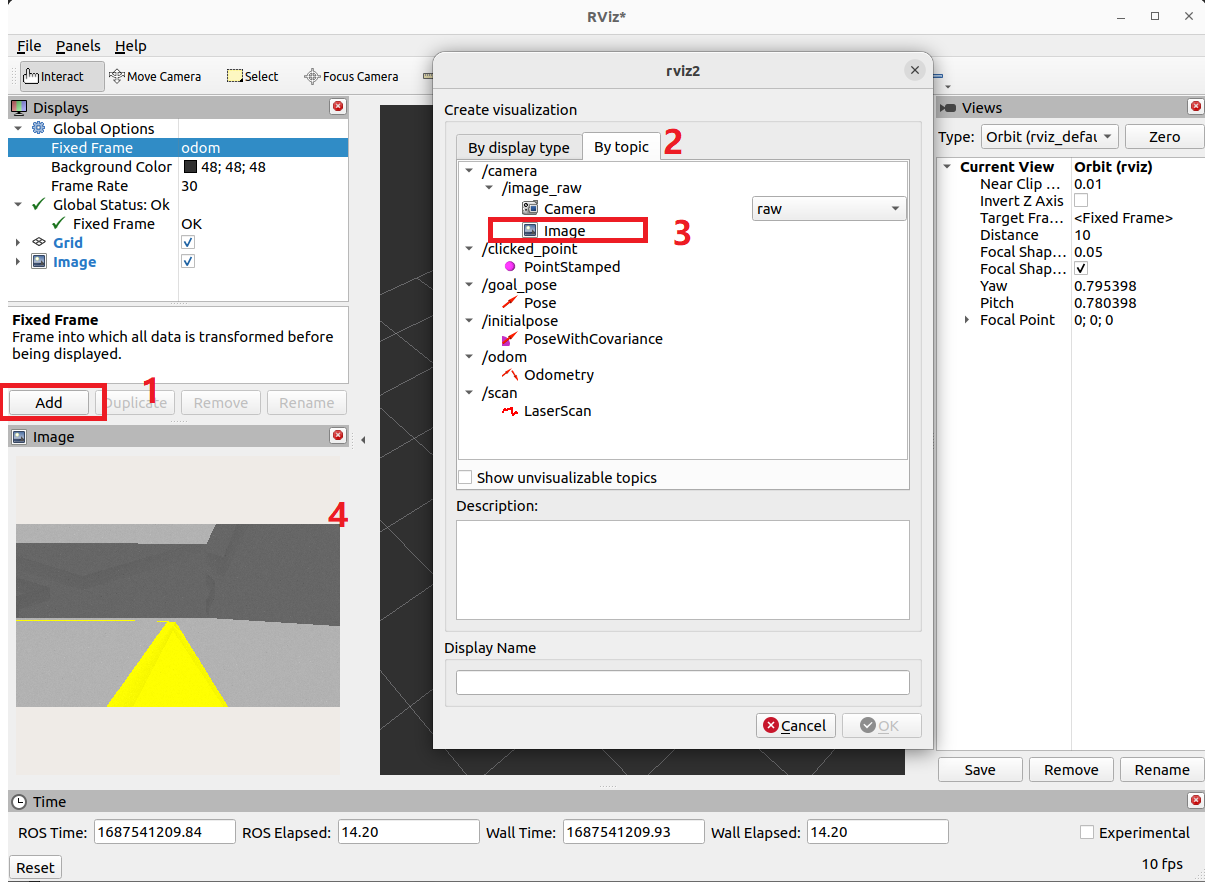
Start Rviz, add the Image display item, and you can see the real-time image data:
Start the visual line patrol
Reopen a terminal and start the visual line patrol function:
After successful startup, the simulated robot starts to patrol the line, and at the same time, a real-time display of the patrol line detection result pops up.
More complex visual patrols
There is also another more complex patrol map in the code repository, and you are welcome to try to rewrite the patrol code yourself.
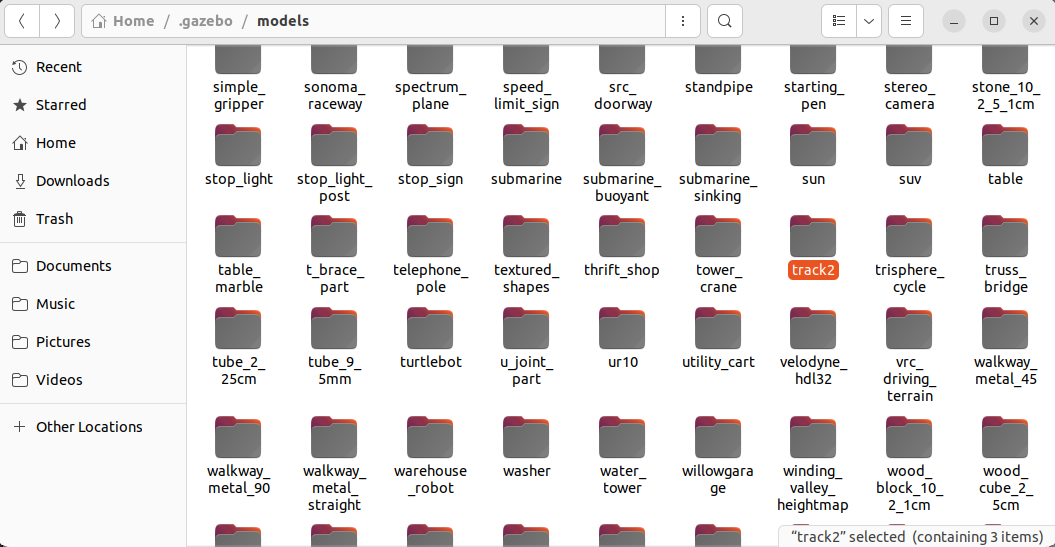
Copy the line patrol model
Copy the "track2" model folder in the models file in the originbot_gazebo feature pack to the ~/.gazebo/models folder:
Modify the patrol map
Modify the originbot_follow_line_gazebo.launch.py in the launch folder of the originbot_gazebo feature pack and modify the simulation environment file to the following values:
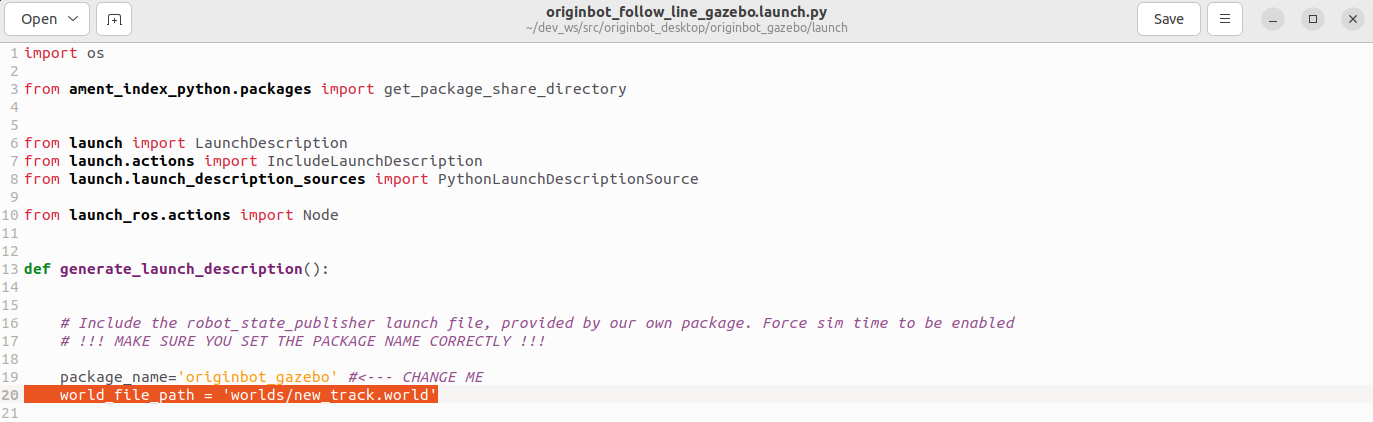
Save and close when the modifications are complete.
Start the line patrol environment
Recompile the workspace in the root directory of the workspace to ensure that the above configurations take effect:
Run the following command on the PC:
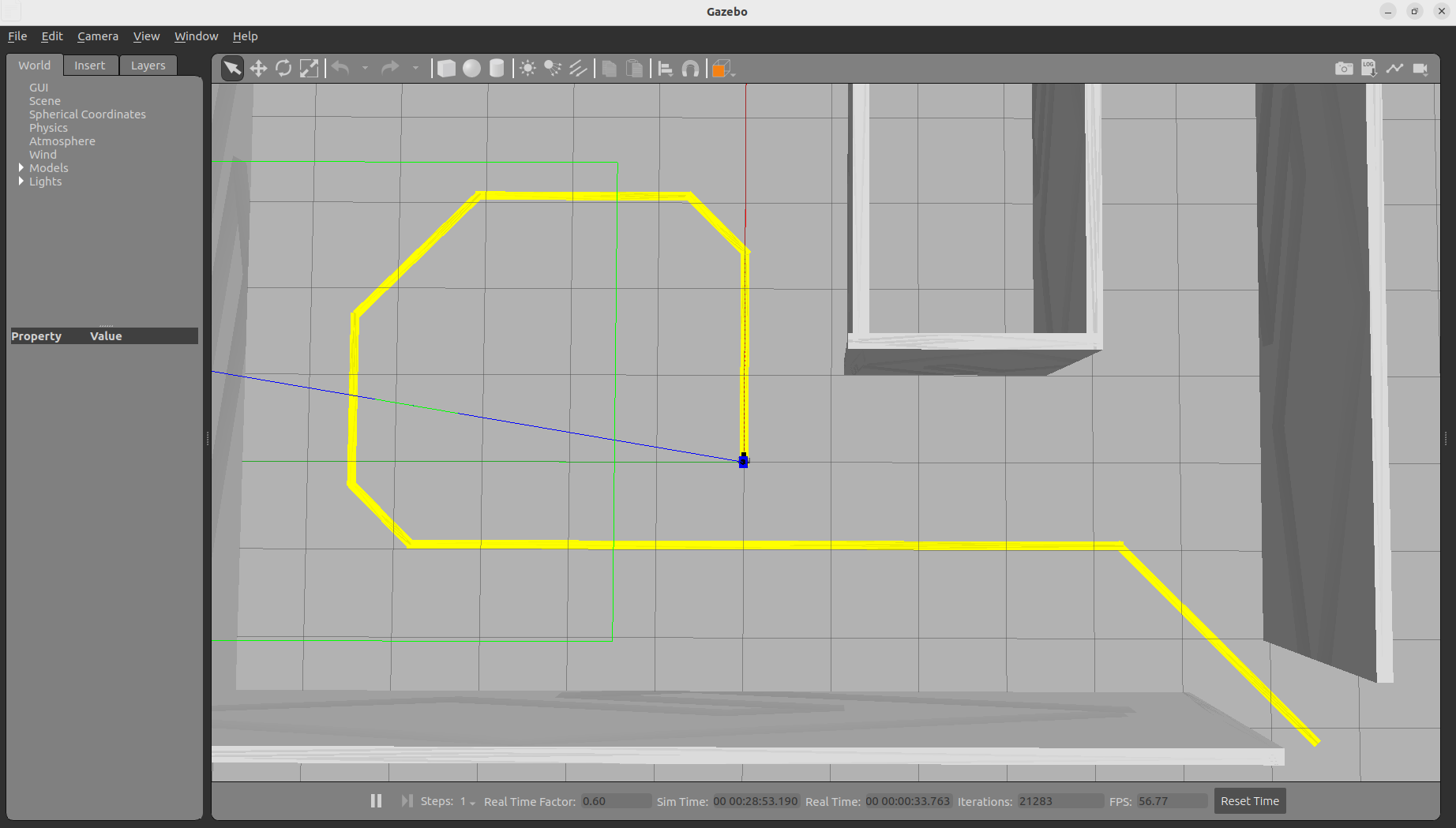
After the launch is successful, you can see a more complex map, you can try it yourself, welcome to share the effect of successful operation to the Guyueju community!