快速上手
完成套件组装和系统烧写后,接下来就可以准备启动OriginBot了。
上电启动
(1)打开电源总开关,扩展板电源灯点亮、RDK X3/RDK X5电源指示灯点亮
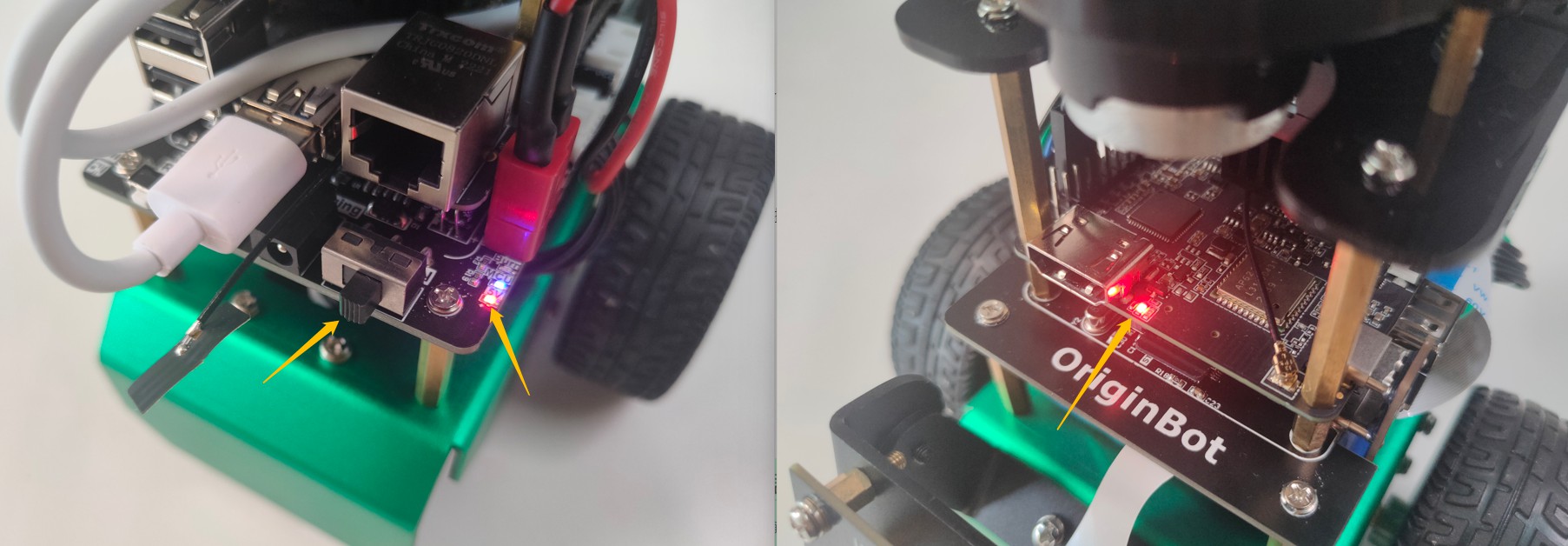
(2)雷达开始旋转(如有连接)
(3)稍等5~10s,启动成功
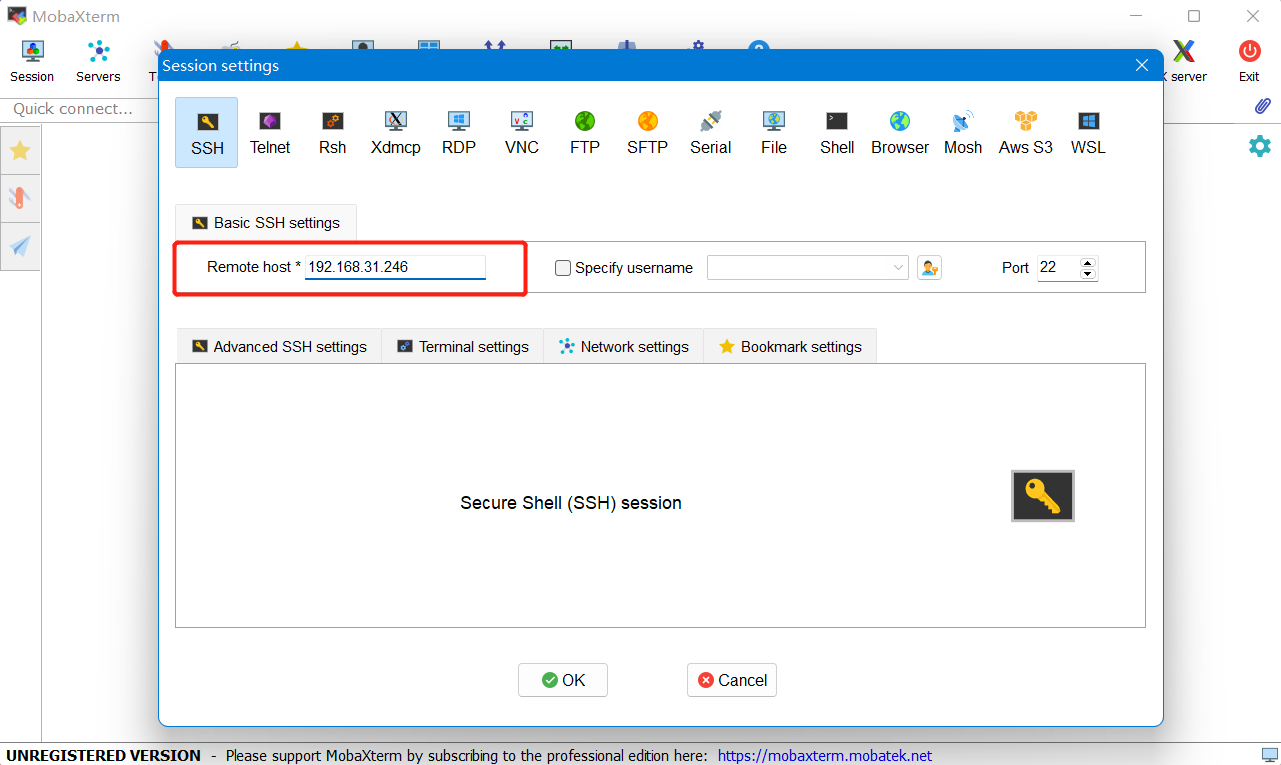
远程连接
(1)启动SSH软件,远程登录OriginBot
Info
如果在PC端的Ubuntu环境中,也可以在终端中使用以下命令实现ssh远程登录(注意将IP地址修改为实际地址;如果使用虚拟机,要将网络设置为桥接模式): ssh root@192.168.31.246
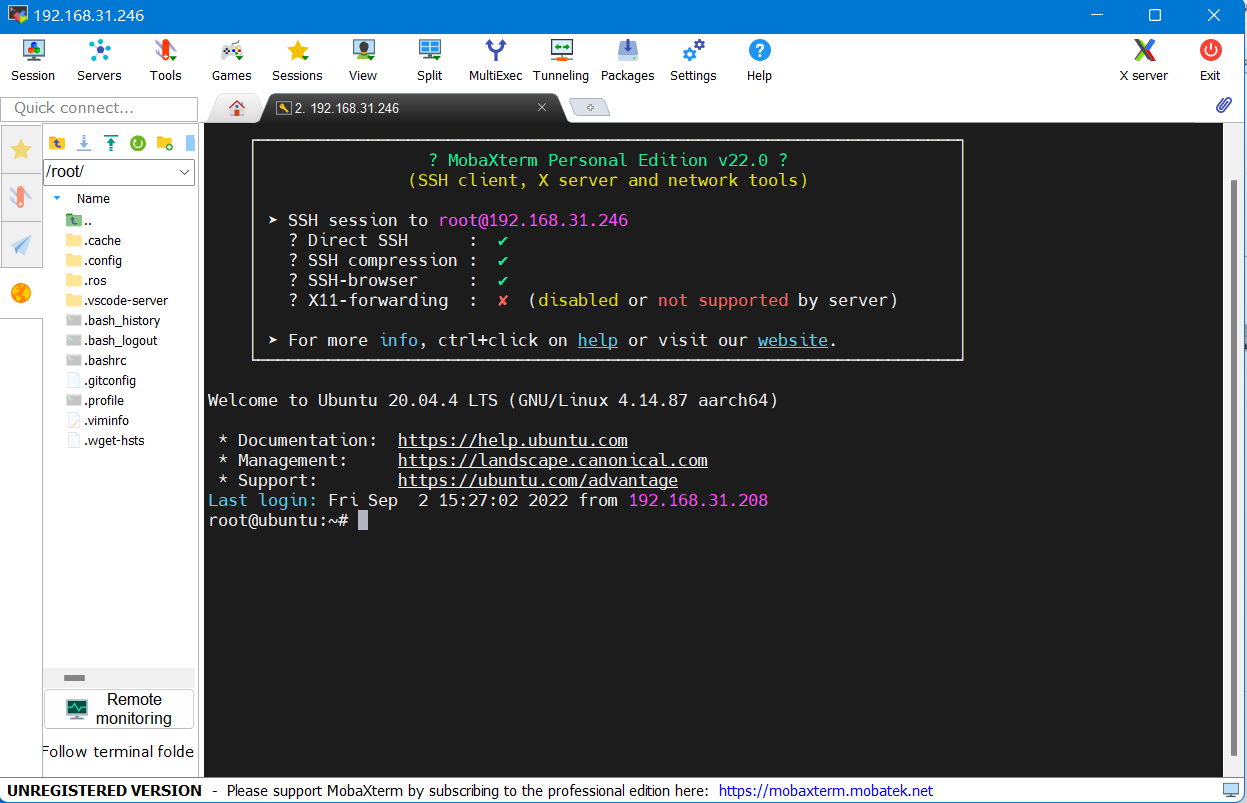
(2)输入用户名和密码:root(用户名),root(密码)
(3)远程登录成功
示例运行
我们先来运行机器人遥控的示例,熟悉机器人的基本操作。
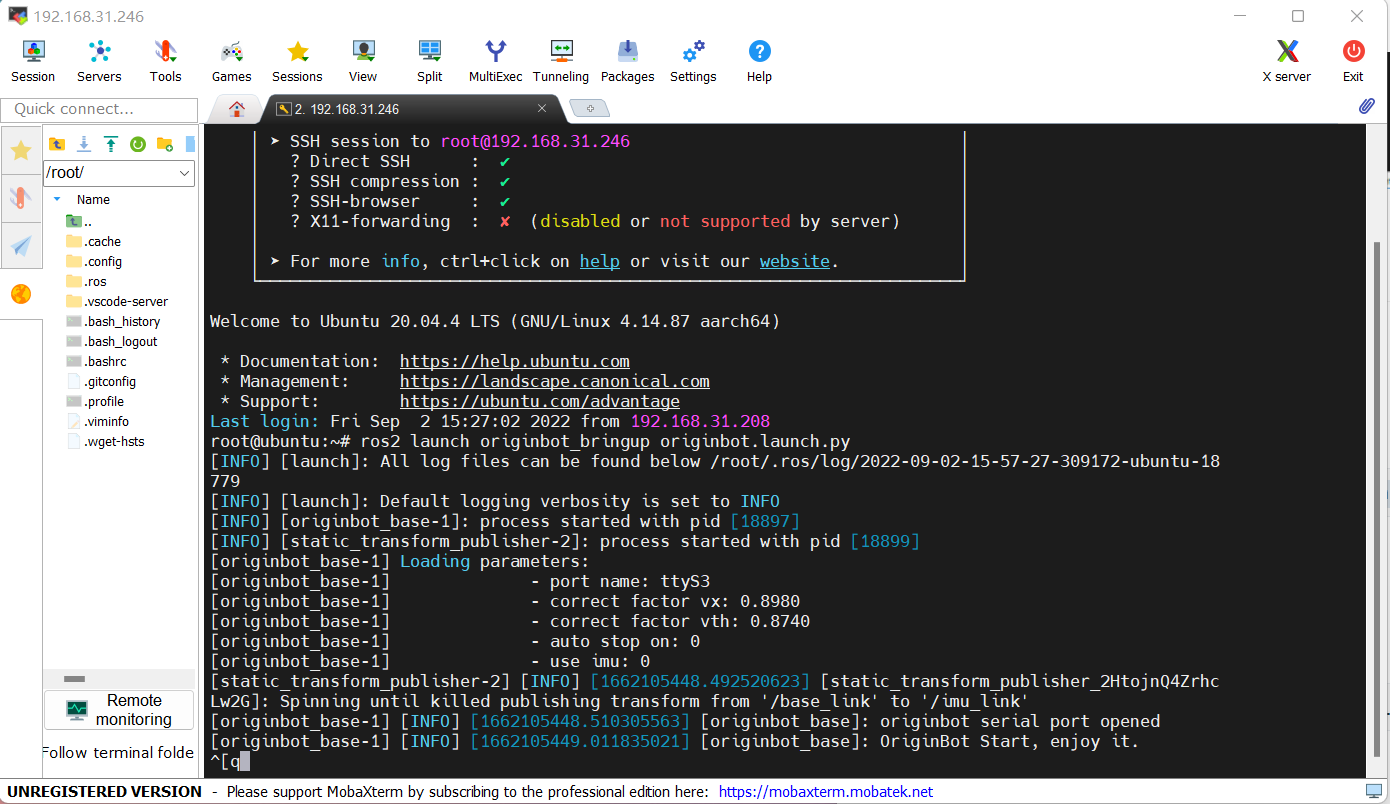
SSH连接成功后,输入以下指令,启动机器人底盘驱动:
Hint
启动成功后,可以听到机器人控制器的蜂鸣器短鸣0.5秒。
再启动一个SSH远程连接的终端,运行如下指令,启动键盘控制节点:
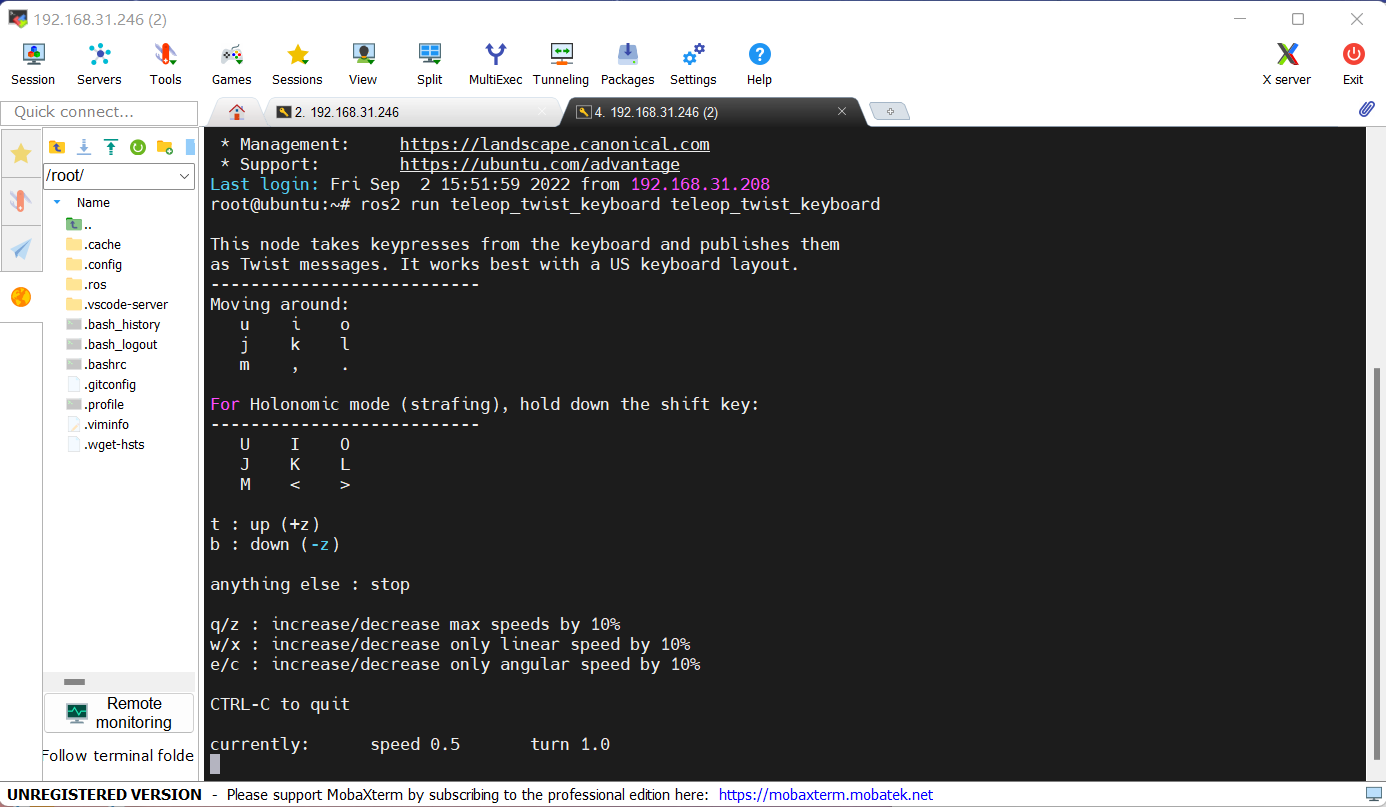
根据终端中的提示,即可控制机器人前后左右运动了,也可以参考提示,动态调整机器人的运动速度。

Hint
如果机器人启动自动停车功能,松开按键后0.5秒,机器人会自动停车;如果关闭自动停车功能(默认),松开按键后,机器人不会自动停止,必须要点击“k”才能控制停车。
断电关机
如果需要关闭机器人,可以在终端中输入如下指令,关闭软件系统:
稍等5秒左右,就可以关闭机器人控制器上的电源开关,机器人关机完成。
Attention
直接关闭电源开关也可以断电关机,但有可能损坏软件系统正在读写的文件,导致系统出现意外问题。
至此,我们已经初步上手OriginBot啦,可以参考“基础使用”和“应用功能”继续深入开发。
