Controller firmware installation
The controller of OriginBot does not have firmware burned from the factory, and you can install the firmware in one of the following two ways.
- Directly burn the official pre-compiled firmware【Recommended】
- Download the firmware through source code debugging
Burn the controller firmware
Download the official firmware
Please select the following table to download the controller firmware suitable for your robot.
The latest version
| project | version | Release date | Download link | illustrate |
|---|---|---|---|---|
| OriginBot controller firmware | v1.0.5 | 2024.3.1 | originbot_controller_firmware_v1.0.5 | The firmware of the OriginBot controller can be directly burned and used |
If you need to download the image of the previous version, you can click here to jump to download
Connect the burning cable
(1)Disconnect the serial communication connection between the controller and RDK X3
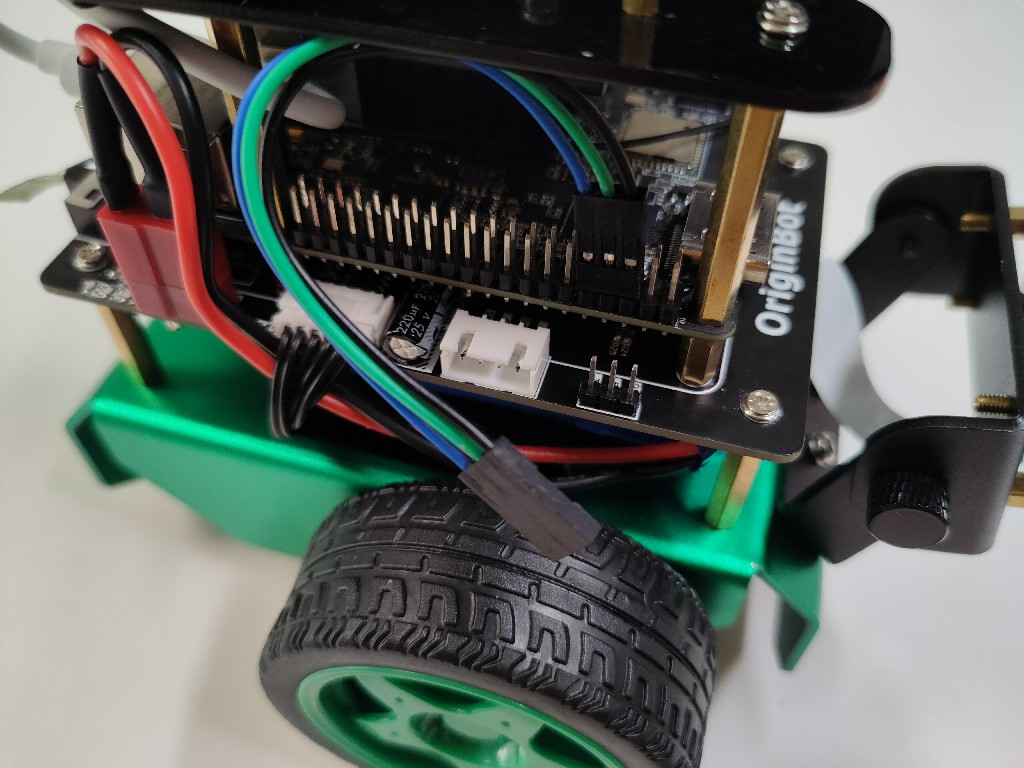
(2)When the firmware is burned, it is powered by the TypeC cable connected later, in order to ensure that the programming is normal, do not turn on the main power switch of the robot
(3)Use a typeC cable to connect the "Burning" port of the expansion board to the computer (you can use the TypeC cable that comes with the lidar)
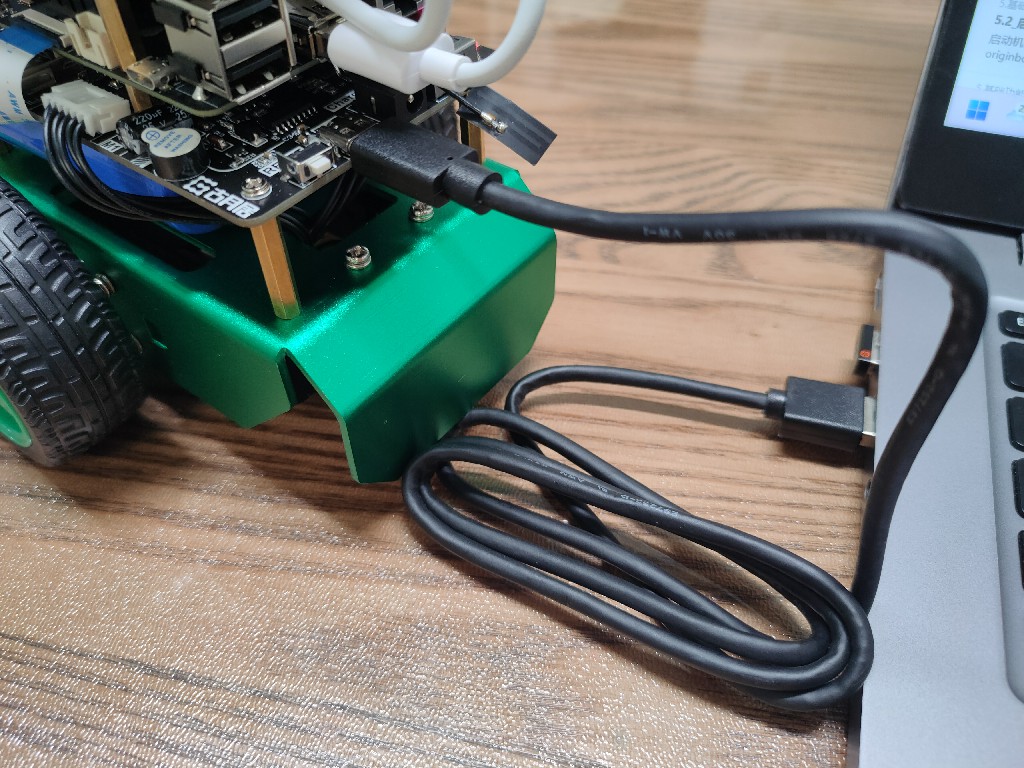
Hint
The Burning port will supply power to the controller through USB, if there is already firmware in the controller, which adds battery protection, the buzzer will often sound when the voltage is lower than 9.4V, so if the buzzer keeps ringing at this time, it can be ignored.
Download the official firmware
(1)Start the flymcu software on the computer(click here to download);
(2)Click Port and select the serial port to burn the firmware(select the serial port with the "CH340" number);
(3)In the flymcu software, select the firmware file to be burned, configure it according to the figure below, and click "Start Programming";

(4)Wait for the log on the right to indicate that the programming is completed and the firmware download/update is completed;
(5)After the download is finished, restore the serial communication connection between the controller and RDK X3.
Debugging and downloading the source code
The source code of the OriginBot controller firmware is completely open source, you can also download it from the originbot_controller,and then configure the development environment for online debugging or secondary development.
Install the Keil software
Visit the download page of Keil software and click to download the software:

After the download is complete, you can follow the steps below to complete the installation of the software:

Download the firmware source code
Run the following command to download the source code of the OriginBot controller firmware:
Open the project and install the dependencies
After launching the Keil software, select Open Project, select the previous step to download the project file from the source code, and proceed to install the necessary software packages:

Compiler configuration
OriginBot controller firmware requires the Keil V5 compiler to compile. Some users who download Keil directly may need to download an additional v5 compiler. Here is a reference link for users' reference:: Stm32 configs the compiled version of keil5
Debug the download
If you use the debugger to debug online, you need to configure the following parameters:

If you want to compile and generate the HEX binary file and download it via USB, you need to configure the following configurations, and then compile it to appear the HEX file, which can be downloaded through the FlyMCU software:

