上位机控制说明
Hint
操作环境及软硬件配置如下:
- OriginBot机器人(Lite版/标准版/Pro 版)
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
应用介绍
在机器人界面开发中,QT 设计同样是不可忽视的一环。如何将QT界面开发和ROS2、OriginBot联系起来呢?本次示例就希望通过一个简要的开发给大家一个示例。希望大家在后续开发中逐渐完善,部署到自己的项目中。
运行方法
此次的功能包,我们放在了originbot_desktop/originbot_app中,那么如何使用呢,在PC端的originbot_desktop目录下,运行如下命令
运行后可以看到出现如下界面
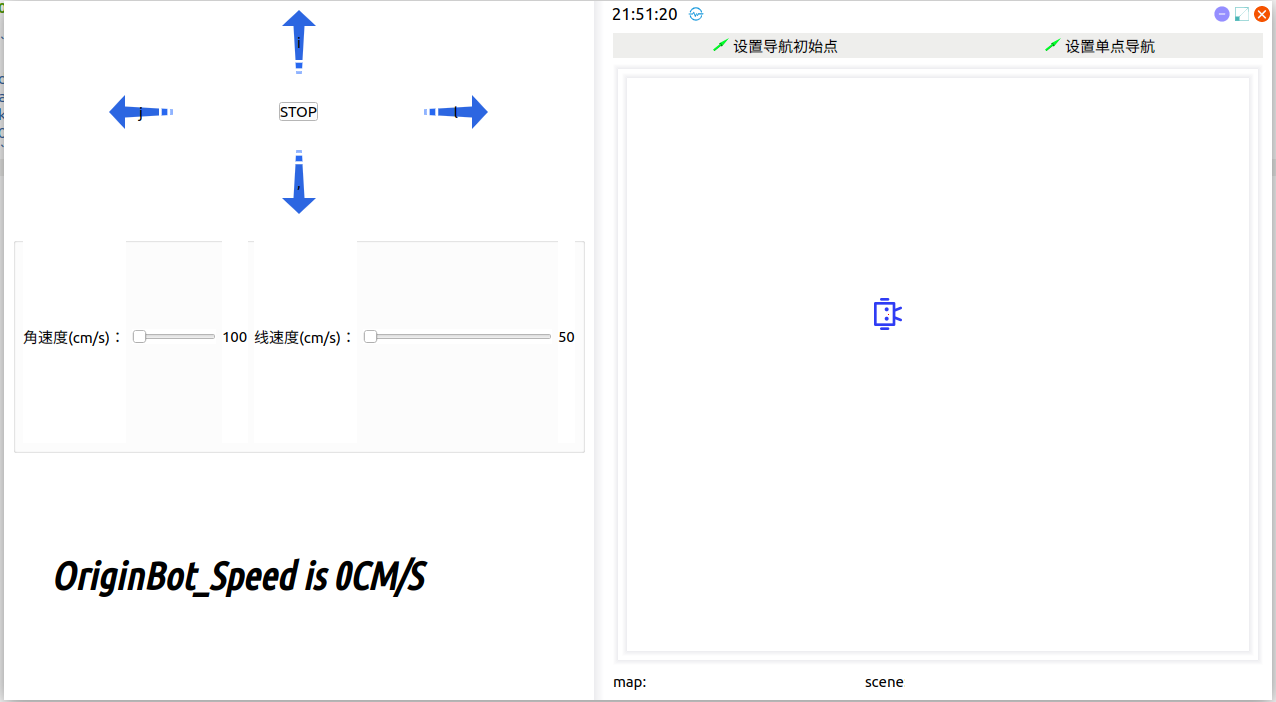
实现功能
此QT实现了什么功能呢?在左边,是前后左右的按键控制键,当启动底盘之后,大家可以通过按键以及下方的角速度、线速度控件实现QT控制小车移动。右边是一个简化的Rviz界面,在这个界面大家可以实现建图和导航的功能。
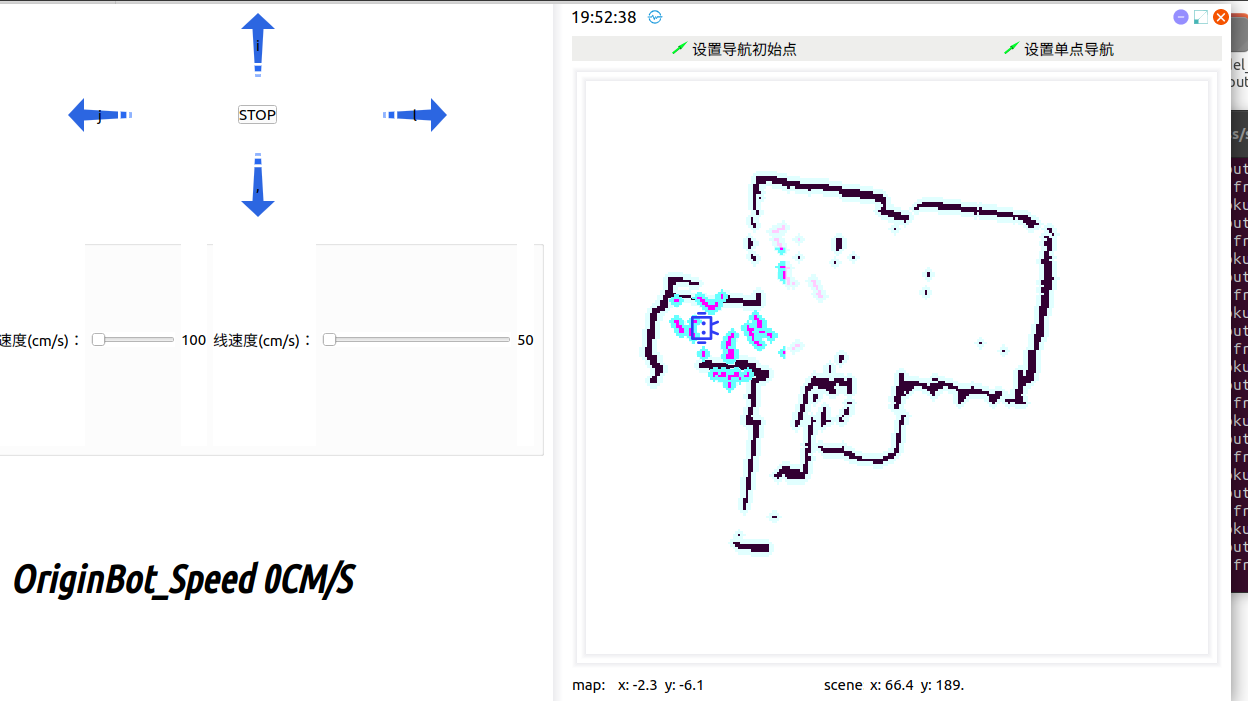
大家可以直接运行导航、建图程序,RVIZ中的界面将会在此QT中展现出来。
导航示例
启动底盘
$ source /opt/ros/foxy/setup.bash
$ ros2 launch originbot_bringup originbot.launch.py use_lidar:=true
启动QT界面
启动导航:
运行后,大家可以看到如下界面:
点击设置单点导航
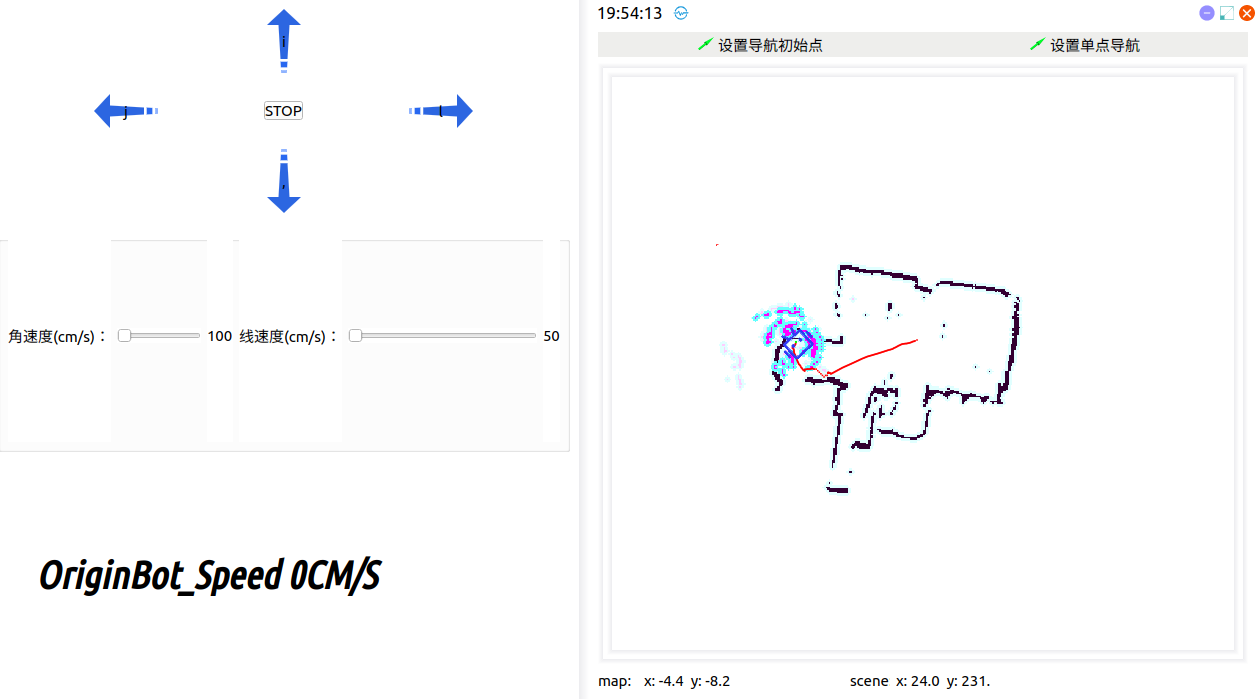
机器同样会规划规划路径并移动。
