控制器实时操作系统RTOS配置
Hint
操作环境及软硬件配置如下:
- OriginBot机器人(Lite版/标准版/Pro 版)
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
FreeRTOS搭载
在控制器固件安装一栏中,大家已经搭载了一般的微控制器处理固件,但是除了一般的处理固件,此处将提供大家关于微控制器实时操作系统中FreeRTOS的处理固件。
FreeRTOS的写入方式与写入一般固件一致,我们提供了一个能实现与一般处理固件功能一致的FreeRTOS示例固件供大家烧写。
操作方式如下:
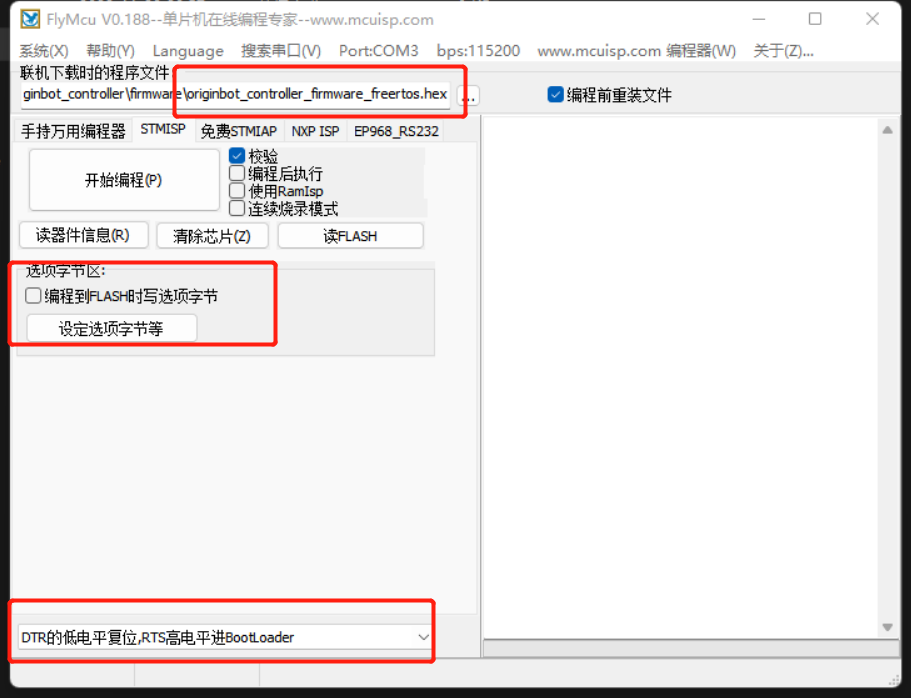
(1)电脑端启动flymcu软件(点击此处下载);
(2)点击Port,选择烧写固件的串口(选择带“CH340”编号的串口);
(3)在flymcu软件中,选择准备烧写的固件文件,按照下图进行配置后,点击“开始编程”;
FreeRTOS简介
RTOS(Real Time Operation System)
RTOS全称为 Real Time Operation System,即实时操作系统。RTOS强调的是实时性,又分为硬实时和软实时。硬实时要求在规定的时间内必须完成操作,不允许超时;而软实时里对处理过程超时的要求则没有很严格。RTOS的核心就是任务调度。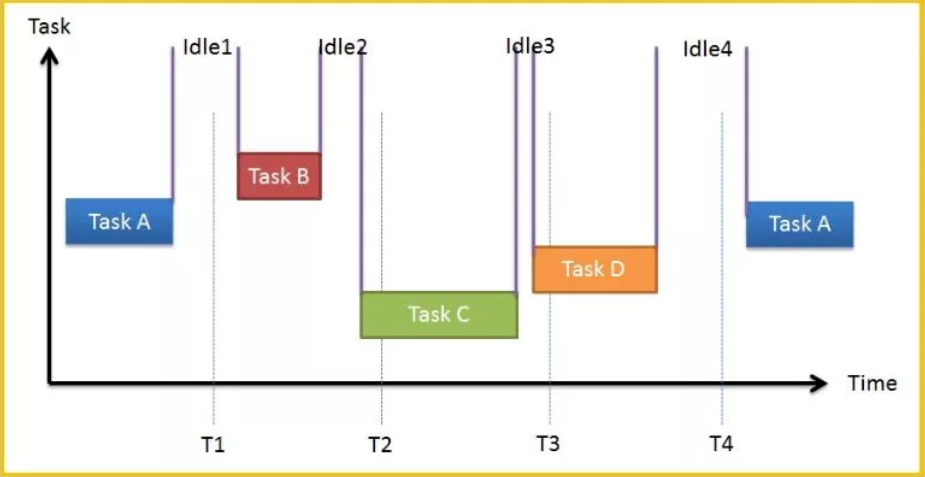
FreeRTOS
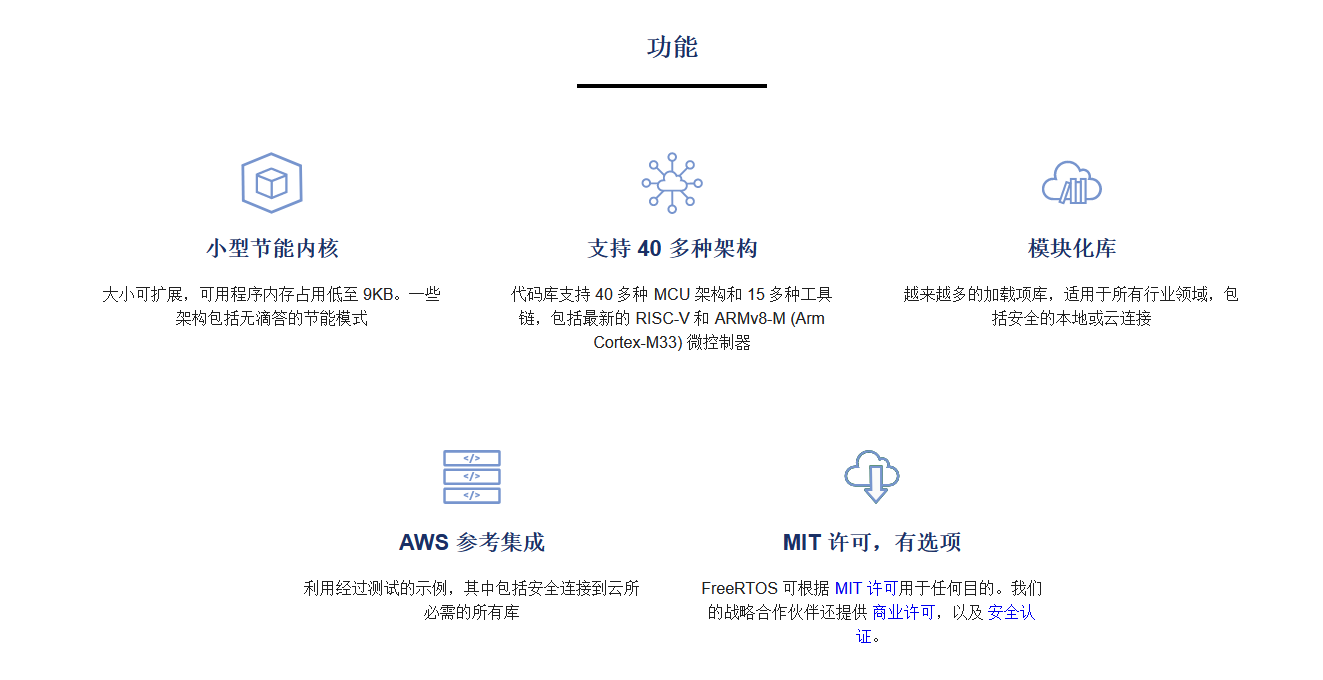
FreeRTOS是RTOS的一种,尺寸非常小,可运行于微控制器上。微控制器是尺寸小,资源受限的处理器,它在单个芯片上包含了处理器本身、用于保存要执行的程序的只读存储器(ROM或Flash)、所执行程序需要的随机存取存储器(RAM),一般情况下程序直接从只读存储器执行.在FreeRTOS的官网上,我们可以看到其支持的功能。
配置FreeRTOS
配置FreeRTOS需要对原有的代码进行重构,根据FreeRTOS的代码模板重构部分代码使得其遵循FreeRTOS的使用规则,接下来介绍最基本的FreeRTOS配置和部分API。
基本配置
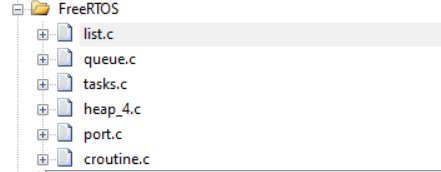
首先需要选择一个发行的版本,每一个版本的API会有一些细微的差别,在此项目中选择的是 V10.2.1,其所有源码托管在代码托管平台
代码下载之后需要将部分文件配置到 originbot_controller 中,主要包括与 MCU 匹配的内核和硬件接口层,可参考码云仓库
在配置过程中需要对部分文件内容进行修改,例如FreeRTOSConfig.h,在此配置文件中定义了FreeRTOS的任务优先级以及堆栈大小等,我们需要在这个基础上增加有关中断机制的定义。
之所以需要定义,原因在于在 port.c 中定义了如下三个中断机制以保证FreeRTOS的任务轮询
由于 xPortSysTickHandler 在原有项目中已经使用故无需重新定义,只需重构原有实现即可。
extern void xPortSysTickHandler(void);
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
任务实现
完成基础配置之后,就可以正式开始任务的创建与实现。
任务创建
关于任务创建,FreeRTOS 提供了 API 给我们使用。格式如下
/* 创建 DemoTaskCreate 任务 */
DemoTaskCreate_Handle = xTaskCreateStatic((TaskFunction_t )DemoTaskCreate, //任务函数
(const char* )"DemoTaskCreate", //任务名称
(uint32_t )128, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )3, //任务优先级
(StackType_t* )DemoTaskCreate_Stack, //任务堆栈
(StaticTask_t* )&DemoTaskCreate_TCB); //任务控制块
if(NULL != DemoTaskCreate_Handle)/* 创建成功 */
vTaskStartScheduler(); /* 启动任务,开启调度 */
故我们可以参照如上实现定义我们需要的多个任务。
void start_task(void *pvParameters);
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //Enter the critical area //进入临界区
//Create the task //创建任务
xTaskCreate(led_task, "led_task", 1000, NULL, LED_TASK_PRIO, NULL);
xTaskCreate(buzzer_task, "buzzer_task", 1000, NULL, BUZZER_TASK_PRIO1, NULL);
xTaskCreate(uart_task, "uart_task2", 1000, NULL, RECEIVE_HANDLE_TASK_PRIO, NULL);
vTaskDelete(StartTask_Handler); //Delete the start task //删除开始任务
taskEXIT_CRITICAL(); //Exit the critical section//退出临界区
}
任务延时
除了任务创建API之外,任务延时在FreeRTOS中也是极其重要的一个实现,在FreeRTOS简介中可以看出本质上每一个任务都有四个状态,就绪态、挂起态、运行态、阻塞态。简单介绍其流程叙述为:
(1):创建任务→就绪态(Ready):任务创建完成后进入就绪态,表明任务已 准备就绪,随时可以运行,只等待调度器进行调度。
(2):就绪态→运行态(Running):发生任务切换时,就绪列表中最高优先级的任务被执行,从而进入运行态。
(3):运行态→就绪态:有更高优先级任务创建或者恢复后,会发生任务调度,此刻就绪列表中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态, 依然在就绪列表中,等待最高优先级的任务运行完毕继续运行原来的任务(此处可以看做 是 CPU 使用权被更高优先级的任务抢占了)。
(4):运行态→阻塞态(Blocked):正在运行的任务发生阻塞(挂起、延时、 读信号量等待)时,该任务会从就绪列表中删除,任务状态由运行态变成阻塞态,然后发 生任务切换,运行就绪列表中当前最高优先级任务。
(5):阻塞态→就绪态:阻塞的任务被恢复后(任务恢复、延时时间超时、读 信号量超时或读到信号量等),此时被恢复的任务会被加入就绪列表,从而由阻塞态变成 就绪态;如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换, 将该任务将再次转换任务状态,由就绪态变成运行态。
(6) :就绪态、阻塞态、运行态→挂起态(Suspended):任务可以通 过调用 vTaskSuspend() API 函数都可以将处于任何状态的任务挂起,被挂起的任务得不到 CPU 的使用权,也不会参与调度,除非它从挂起态中解除。
(7):挂起态→就绪态:把一个挂起状态的任务恢复的唯一途径就是调用 vTaskResume() 或 vTaskResumeFromISR() API 函数,如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,将该任务将再次转换任务状态,由就绪态变成运行态。
而任务延时即将任务转变成阻塞态,在FreeRTOS中有两个任务延时 API。
vTaskDelay()
vTaskDelay()在我们任务中用得非常之多,每个任务都必须是死循环,并且是必须要有阻塞的情况,否则低优先级的任务就无法被运行了。要想使用 FreeRTOS 中的 vTaskDelay() 函数必须在 FreeRTOSConfig.h 中把 INCLUDE_vTaskDelay 定义为 1 来使能。
vTaskDelayUntil()
这个绝对延时常用于较精确的周期运行任务,比如我有一个任务,希望它以固定频率定期执行, 而不受外部的影响,任务从上一次运行开始到下一次运行开始的时间间隔是绝对的,而不是相对的。
